 WOOMERAROBOTIC
INSP
WOOMERAROBOTIC
INSP
RELEASED
ECTION–MAYFIELD
TRIPREPORT
BY
28thMay–1stJune
ARPANSA
UNDER
FOI
FEBRUARY
2019
ErinMcCol
CSIROData61|1TechnologyCourt,Pullenvale,QLD
Introduction
TheMayfieldtriptotheWoomeraTestrange,28thMay–1stJune,wasaninitial
investigativetripfortheData61Roboticsteam.
Aim
Theaimofthistripwastotoevaluatetheenvironmentandtestanelementarypallet
inspectionrobot.Thisallowedustoevaluatethefunctionalityoftheplatformwithrespect
RELEASED
tomobilityandsafetythroughtheenvironment,allowingustobetterunderstandthe
challengesandevaluatetherobotdesignsothatimprovementscanbemadeforfuture
phases.
Scope
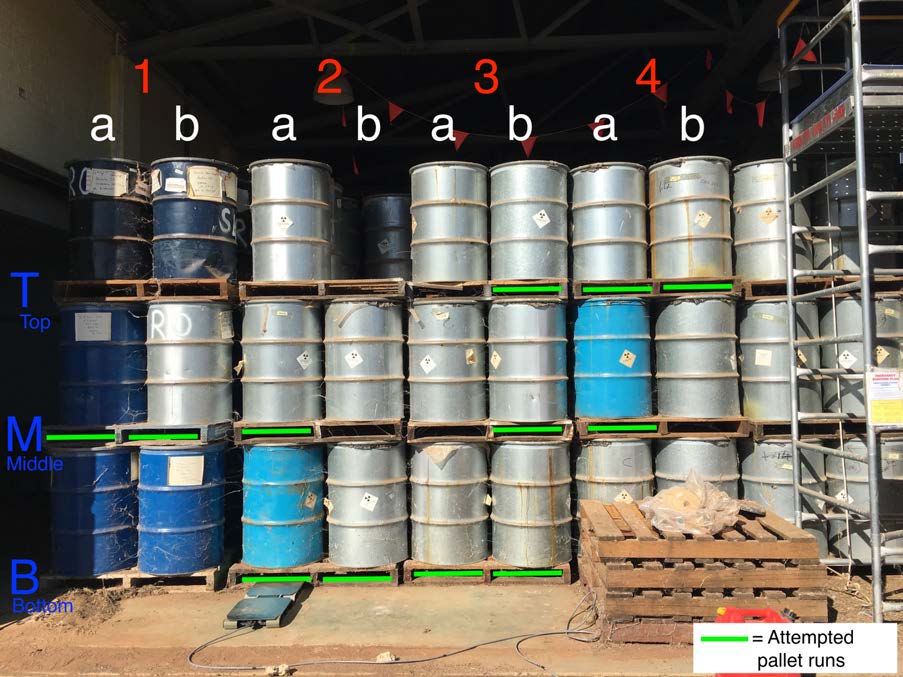
Giventheorientationofthepalletsinthehanger,asubsetofpalletrunswereinvestigated
duringthisfieldtrip.Thesepalletswerethoseaccessiblethroughbaydoor1asindicatedin
BY
Figure1.Therunswerelabelledfollowingtheco-ordinatesystemshowninFigure1.
ARPANSA
Thescopeofthisworkwasprimarilytestingtheabilityofthepalletrobottomove
consistentlyandeffectivelythroughtheenvironment.Therefore,itwasprincipallyatestof
thechosenmechanicaldesignandthepowerandcontrolsystems.Anominalsensing
packagewasincludedtoassistinthenavigation,thisincludeda
singlefrontfacingcamera,
lightingandasmalllowcostdepthsensor.Whilstthescopeofthistripwasnotfocused
aroundsensinganddatagatheringthesesensorsdidallowforsomedatacaptureduringthe
UNDER
testruns.
FOI
FEBRUARY
2019
Figure1–Locationandco-ordinatesystemofpalletrunsaccessedduringtrial



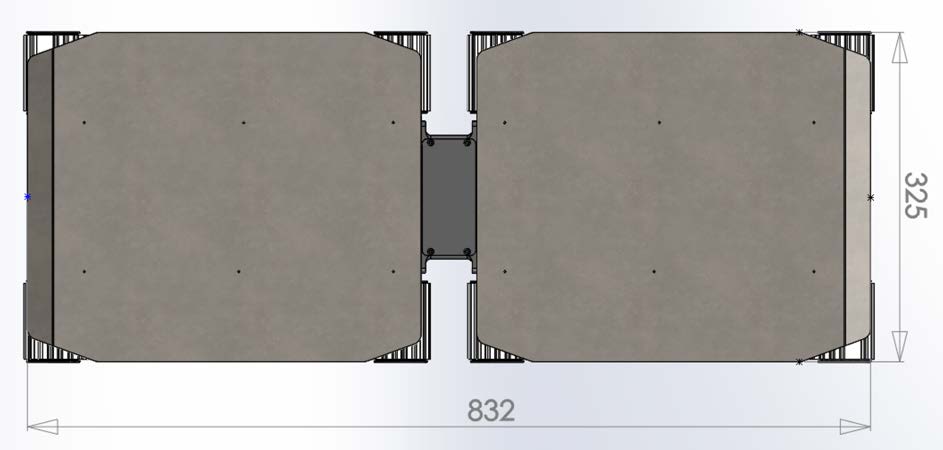
PalletRobotDesign
Aminimalviableplatformwasdesignedforthistrip,toassesstheplatformsenvironmental
suitability.ThepalletrobotusedforthistestingisshowinFigure2,itconsistsoftwohalves
butwithatotallengthof832mm,atotalwidthof325mmand64mmheightasdefinedin
theFiguresonthetitlepage.
Thefrontsectionincludeslighting,acamera,anddepthsensor(Figure2a),Thebackhasthe
RELEASED
connectionpointforthetetherandpowerswitch(Figure2c).Thetethercarries110Vpower
andcommunicationoverEthernet,allcontrolisdoneoffboardusingtheRobotoperating
system(ROS)onaLinuxlaptop,controlledwithagamepadcontroller.Internallythereisa
voltageregulator(110và12V),2xmotorcontrollers,and4motors.Thetetheralsoactsas
aretrievalsystemshouldtherobotgetstuck.
BY ARPANSA
Figure2a:Thefrontoftherobot.ThewhiterectanglesdirectlynexttothetracksoneachsideareLED
lightswithaplasticcover.Thecentreuppercameraisastandardvideocamera.Thecentrelowercamera
isatime-of-flight3Dcamera-thepicoflexx. UNDER
FOI
FEBRUARY
Figure2b:Thecompleterobotwithoutatetherattached.Thefronthalfoftherobot(withthecameras)is
ontherightsideoftheimage.Theleftsideoftheimageisthebackhalfwiththetetherconnectionpoint
andpowerswitch.
2019
Figure2c:Thebackfaceoftherobot.Thetetherconnectionpointisshowncentrewiththepowerswitch
totheright.


PalletRunResults
Intotal,12uniquepalletrunswereattemptedincludingrunsinthetop(3),middle(5)and
bottomlayers(4).Inmanyinstanceafullruncouldnotbecompletedduetoobstaclessuch
asbrokenpallets,hangingplasticandbowedboards.Afewrunsonthebottomlayerof
palletsweretestedtoadistanceof7m,howevertherobotcouldnoproceedfurther
beyondthisasadifferentpalletconfiguration(4stringer,asopposedto3)werefoundat
RELEASED
thisdepth–Figure3.Eachofthepalletrunsarelistedbelowdetailingtheobstaclesand
complicationsaswellastheassociatedvideofileaccompanyingthisrun.
BY ARPANSA
Figure3:a)Astackofpal etswherethetopthreehave3stringers,whilstthebottomisa4-stringer
configuration.B)Lookingatthesamestackfromthesidethetopthreepal etshave5baseboards,whilst
UNDER
the4-stringerpal ethas4baseboards.
Allvideofilescanbelockedinthefol owingfolder:
s 33 - security
FOI
VideoResults
FEBRUARY
PalletRun Notes
VideoFile
RunB-2a
Thesecondpalletinhasbeenplacedontopof
B-2a_pallet_robot_2018-
somethingandbrokenabottombaseboard.
05-30-14-40-43
Somepalletswith3baseboardsnot5.
2019
RunB-2b
@5minthereisabrokentopdeckboard(3:15of
B-2b_pallet_robot_2018-
Video)
05-30-10-38-43
@7mapalletwith4stringerboardscouldbeseen
(4:25ofVideo)
Thisrunincludedamixofpalletswith5and3base
boards.Thecurrentrobotconfigurationismorelikely
togetstuckinthe3-baseboardconfiguration
particularlygoingbackwards-whichdidoccurinthis
run(6:00ofVideo)
RunB-3a
AFewrocks
B-3a_pallet_robot_2018-
05-29-13-53-08
Extrapieceoftimberlayingonground–caused
minordifficultiesreversingout
RELEASED 4stringerpallet@7mdepth
Thisrunwascompletedagainwithagammameter
attached(seegraphbelow)
RunB-3b
Thisrunhadasheetofblackplastichangingdown.
B-3b_pallet_robot_2018-
Wepushedthroughokaybuttherobotgotcaughtin 05-30
itreversingout.Toremovetherobotphysical
BY
interventionwasrequiredasacombinationofpulling
onthetetherinco-ordinationwithdrivingthetrack
ARPANSA
forwardandmanoeuvringoftherobot.
RunM-1a Brokenbaseboard@0:18ofvideo
M-
1a_pallet_robot_2018-
stoppedallfurtherprogression
05-30-12-05-20
UNDER
RunM-1b Warped+Brokenbaseboard@0:50ofvideo
M-
1b_pallet_robot_2018-
Narrowedheighttoomuch,couldnotproceed.
05-30-12-05-20
RunM-2a Stuckonthetetherclampreversingout–a4base
M-
board,3stringerpallet.
2a_pallet_robot_2018-
FOI 05-30-12-11-51
Alooseboltwasseensittingonabaseboard
FEBRUARY
RunM-3b Abrokentopboardinthe2ndPalletobstructedthe
M-
path,couldnotgofurther.
3b_pallet_robot_2018-
05-30-14-13-13
RunM-4a Abaseboardbowedupandadeckboardbowed
M-
down.Thebaseboardhaseitherfractured,oris
4a_pallet_robot_2018-
aboutto.Wedidnotproceedfurthergiventhe
05-30-11-57-41
2019
difficultyinaccessingtherobotandtetherifstuck.
T-3b_pallet_robot_2018-
RunT-3b
Noobstruction,butdidnotwanttoproceedtoo
05-30-14-21-33
deepasthetoplevel(withoutaplatform)makesit
difficulttoaccessthetetherandrobotforretrieval.
T-4a_pallet_robot_2018-
RunT-4a
Abrokentopboardinthe2ndpalletobstructedthe
05-30-14-17-01
path,couldnotgofurther.
T-4b_pallet_robot_2018-
RunT-4b
Aslightrisefromonepalletstacktothenext.Didnot 05-30-14-17-01
wanttoriskgettingstuckontoplayeranddidnot
proceedbeyondthispoint.
DepthMappingResults
Alongsidethecameraforvisualinspectionwasatime-off-flight3Dcamera.Multipleof
RELEASED
thesesensorsmaybeusedinfutureplatforms.Incombinationwithothersensing
components,thedatagatheredfromthissensorcouldbeusedtobuild3Dmapsofthe
environmentexploredbytheplatform.
Avideofiletitled
“DepthData.mp4”showsashortclipofaninstantaneouspointcould
gatheredbythiscameraalongsidethestandardvideofootageastherobotmovedthrougha
pallet.
BY
GammaDoseMeterResults
ARPANSA
Duringthefinalpalletrunofthetrip,agammadosemeter(PDS-GO)wasaddedtothe
robotandsentthroughpalletrun,B-3a–therunweweremostconfidenttraversing.The
additionofthissensorcompromisedthemechanicalintegrityofthejoinerbetweenthe
frontandbackhalfoftherobotshence,greatercarewasrequired.Thiswasalsothelastrun
achievableasduringthistestareartrackoftherobotwaslostduetofatigueof3Dprinted
componentsandtrackquality.Ashortclipshowingtheleftbehindtrackisvisiblehere:
UNDER
s 33 - security
titled s 33 - security
GammaDetectionFOI
60
50
FEBRUARY
40
dose
30
rateuR/h
background
se 20
Do 10
2019
0
1
50
99
148
197
246
295
344
393
442
491
540
589
638
687
736
785
Time(second)
Figure4:GraphofthedataobtainfromthePDS-GoDosemeterforonepal etrun–LocationB-3a
FortheresultsseeninFigure4,therobotwasinthepalletsforapproximately14mins,
whichisreflectedbythetimeinsecondonthexaxis.Thisincludedgoingintoandoutofthe
palletrun,thereforetheresultontheright-handsideofthegraphareareflectionofthose
ontheleft.Thespikeseenat99secondsand~760secondswouldhavebeentakenatthe
samedepthintothepalletrun.Atthisstagewithlimitedpositioncontrolontherobotexact
positioncannotbedeterminedbutthiswillbeavailableinthefutureversionoftherobot.It
shouldbenotedthatthetimespentundereachdrumwasnotconsistentormonitored
whichwillaffecttheaccuracyofthedosereadingastimeisrequiredtoobtainstable
accuratereadings.
Overal notes
RELEASED andfindings
QualityofPalletRuns
Mostrunswelookedathadsomesortofcomplicationorinterestingfeature.
- Rocks
(notanobstacle)
- Bolts
(notanobstacle)
BY
- Brokenbaseanddeckboards
(onlyanobstacleifextremebrakeage)
- Warped/bentbaseanddeckboards
ARPANSA
o
(onlyan14minobstacleifsignificantwarpingdecreasedtheheightto<
70mm)
- Hangingplastic
Themiddlepalletrunhassignificantbowingandbreakage,whicheitherlimitsaccess
completelywithbrokenbeams,createslargedrops,ornarrowsthespacebeyondwhatis
UNDER
accessible.Themiddlerunwilllikelyhavethemostdamageandbethemostdifficultto
transverse.Thegroundlayergivesustheflattestsurfacetomoveacross.Thetoplayer
palletswilllikelyhavelessdamagethanthemiddlelayerbutgiventheelevatedheightitis
difficulttoretrieveastuckrobotwithoutanelevatedplatform.
FOI
Accesstotheallotherpallets
Foraccesstotheremainingdrums,duetothealignmentofthepallets,theendwallofthe
FEBRUARY
hangerwillneedtoberemoved.Additionally,theconcreteBundingattheendofthe
hangerwilllikelyobstructtheentrancetothegroundlayerpallets(Figure5).Wewillneed
toinvestigateifwecanremovethisBundingtoachieveaccess.
s 33 - security
2019
Figure5:Bundingattheendofhangerfive.A)showinghowthebundingsitsabovegroundlevelthatthe
palletsareplacedon.B)themetalsheetingoverthebundingandplubingfeturesalongthiswall.

Thegapbetweenthepalletsatdoor5(Figure6)couldbeusedtoplacetherobotintoarun
ifregulatorypermissionisgivenandtherobotisdesignedaccordingly.–i.e.theabilityto
bendtherobot,haveitplacedinassmallersectionsatatimeorthefunctionalitytoturn
underitsownpowerintoeachrun.Thiswouldbeusefulifanyofthefollowingoccur:
1. TheBundingdoesnotallowaccesstothebottomlayerofpallets–orifwecannot
destroyit.
RELEASED
2. Ifwedogetaccessfromtheendofthebuildingbutthereisanobstructionwithina
palletrunandthefullruncannotbecompleted-thegapatbaydoor3could(with
significantengineeringeffort)allowfortherobottodothesamerunfromtheother
direction.
3. Thesecondsetofpalletsafterthegap
maynotbeaccessiblefromtheoriginalset
duetomisalignment–bothverticalandhorizontal.
BY ARPANSA
UNDER
FOI
Figure6:Thesmallgapthatexistsapproximatelynearbaydoor5.
FEBRUARY
However,thereislikelyasignificantsafetyissueforpeopletoaccessthisspaceand
manuallyplacetherobot,participiallytoreachdeeperpalletruns.Effort
couldbespent
deigningarobotwhichcoulddriveitselfdownthislocationandturnintoarun,butthisis
accompaniedwithsignificantcomplicationstothedesign-articulatedsections,pulleyson
tethersetc.Thiswilllikelyonlybeconsideredafterfirsttestingthemoreachievablerigid
bodydesigninthissectionofpallets.
2019
Differentpalletconfigurations
Itwasdiscoveredthroughtestingthatthereareanumberofdifferentpalletconfigurations
withinthehanger.Therepalletsdonotappeartobeorderedorplacedinanyspecific
locationthefollowingconfigurationshavebeenfoundsofar.
1. 3stringer–5baseboards
2. 3stringer–3baseboards
3. 4stringer-3baseboards.
The4stringerpalletsaddcomplicationastheyhave3runsperpalletasopposedtothe2in
a3-stringerpallet(Figure3).This4-stringerpalletbecomesparticularlydifficultifitis
alignedwitha3-stringerpalletasthechannelwidthavailablefortherobottotransverseis
cutdownto150mm s 33 - security
Theotherconfigurationwhichprovedchallengingfortherobottotransversewasthe3-
stringer,3-baseboardconfiguration.Thiswillbeeasilyrectifiedinthenewdesignasthe
robotwillbesectionedsothatnoonelengthislessthanthelengthbetweenthesebase
RELEASED
boards.
Robotcontroloptions
Thetetherprovidedtobeagoodcontrol/poweroptionforthepalletrobotasitisgoing
intoextremelydifficulttoreachplacesandoccasionallyneededassistancetoberemoved
BY
fromtheselocations.Therefore,thetetherprovidestheabilitytopullbackandretrievethe
robot.Additionally,giventhelimitedsizethereisnoroomforon-boardpower.
ARPANSA
However,afterinvestigatingtheenvironmentthatthetopofdrumsrobotwillbetraversing
itwasconcludedthatthetethercouldprovefarmorecomplicatedforthisscenario.Thetop
ofdrumsrobotwillbemakingmultipleturnswhichcomplicatestheengineeringrequired
fortetherdeploymentsystems.Additionally,therecouldbethepotentialforthetetherto
dropdownbetweenbarrels,particularlythosearoundtheedgeswhichcouldcausesafety
UNDER
hazard.
s 33 - security
FOI
FEBRUARY
CollaborationwithAntso
Oneoftheprojectpartnersworkingondetectiontechnologiesforthisprojectisthe
AustralianNuclearScienceandTechnologyOrganisation.Throughdiscussionwithstaffon
siteduringtheMayfieldtrip,thereissignificantpotentialtotakesomeoftheirprototype
sensingequipment,specificallythescintillatordetectorsandmountingtheseinourrobotic
platforms.Thispotentiallyincludesthelow-profilepalletrobot,dependingonfinalsizeand
2019
configuration.
Additionally,givenCSRIOData61’sexperiencewith3Dmappingthereisawealthof
knowledgeinthisareawhichcouldbesharedwiththoseworkingontheANSTO
technologies.ANSTOstaffonsiteexpressedinterestinincorporatingstationarylaser
scanningintotheirgammadetectionsystemwhichData61staffcanassistwith.
TechnicalLearningforPal etRobot
Thereweresignificanttechnicallearningsgainedthroughtestingthepalletrobotthrough
theenvironment.Thesearemostlyincludedherefordocumentationpurposeandinsight
intotheengineeringworkweplantoinvestigatebetweennowandthenexttrip.These
ideasarenotaguaranteeforwhatwillbeincludedintheproceedingdesignsbutitdoes
showwhatinformationwewereabletogatherfromthistrip.
RELEASED
Sensing
Whilstthisproductwasdesignedasaminimalviableplatformwithlimitedsensing,the
learningsfromthistriphavehelpedshapethedirectionandrequirementsofthosesensing
modalitiesweplannedtoincludeforfuturetests.
• Morecameras:
BY
o Lifecamfrontandbackfornavigation–includesautofocusandbrightness,
ARPANSA
bothusefulfeatures.
o Upwardanddownwardfacingcamerafordruminspection.Wideangle,close
rangefocus.
• MultiplePicoflexdepthsensors?
o needtoconfirmifthisdataisgoodforreconstruction
UNDER
o AlternativelylookatOuster(https://www.ouster.io/)LIDAR.However,itis
verylargefortherobotformfactor.(80mmx63mm)
• Morelights
FOI
o ThediffusedLEDsweregoodforclosetomediumrange
o Potentiallygetafocusedhighlumenspotlightforlongdistanceillumination.
FEBRUARY
Thiswouldallowforvisualinspectionfurtherdownthepalletrunevenifthe
pathifblocked.
• LiveOdometry
o Enableanddisplaydistancemeasurementsonscreen(usingPicoflex)whilst
operatingtherobottoconfirmifaspaceisaccessibleornot.
2019
Mechanical
Theprimarypurposeofthisexcursionwastotestthemechanicaldesignofthethrough
palletrobot,themoremechanicallycomplexofthetwoproposedsystems.Alargeamount
waslearntandwillbeimplementedtofurtherrefinethedesign.
• Makeitevennarrower
o ~140-150mmwidetoensureitcanmovethrough4stringerpallets.
o Putthemotorswithinthetrackstoenablemorespaceforsensorsinternally.
• Makeitlonger
o Slightlytooshort.Currentlyonesectioncannotbridgethedistancebetween
baseboardsona3-baseboardpallet.Whichenabletherobottodipintothe
gapsandpotentiallygetstuck.
• Cooling
RELEASED
o Voltageregulatorisgettingveryhot.
o Copperheatsinks+heatsinkepoxy.
o Thestainlesssteel(requirediftherobotwheretoundergochemical
decontamination)isaverypoorheatconductorandthereisnoactive
cooling.Theexclusionofactivecoolingisintentionaltolimittheintakeof
dustinternaltotherobot.
BY
• Trackmaterialandquality
ARPANSA
o Thesetoftracksusedonthebackhalfwereoflowerqualityandcausedfar
moreproblems(trackslippage,couldn’ttensionthemeasily)thanthefront
higherqualitytracks.
• Tetherattachmentdesign
o Thetetherclampusedtoprovidestrainreliefprotrudedtoofarbeyondthe
lengthofthetracksandwouldcausingjammingoftherobotagainstapallet.
UNDER
• Haveaskidplateonthebackbaseoftherobot,adesignsimilartothefrontof
robot.
• Needtoreconfigurethetetherinputlocationastherearfacingcamerawillneedto
FOI
becentred.
• Generally,moreoftherobotwillbemachinedandnotmadeof3Dprintedparts.
FEBRUARY
Particularlysectionslikethetrackrollersandwheelswhichareundertension.
• Rigidorarticulated?
o Weareundecidedwhethertokeeptherobotrigid,ortoarticulatethe
sectionsbetweeneachtracklength.Rigiditysimplifiesthecontrolbutlimits
theabilitytoturn.Mayalsogetwedgedwhensignificantrisesandfallsare
found.
2019
o Testingrequired.WillstartwithRigid.Farsimplercontrol.
Control
• Someonboarddatalogging
o PotentiallytheUPboard
o RunningaROScontrolnodeloggingdataonboard.
o Limitstheamountofdatarequiredtostream.Lendingitselftobetterdata
integrity.
• PotentiallyuseFibreforcommunication
o Lightweight(50-60mlength)
o Unlikelywewillhitbandwidthissues.
RELEASED
• Motors.
o morepower.
• Encoders
o Duetolastminutecomponentfailure,DCmotorshadtobeincludedinthis
porotypewhichhadnoencodersandthereforetherobothadnoposition
feedbackandcontrol.
BY
• Autodistancingoftherobotfromsideofpallet.
ARPANSA
o Anicetohavefeaturewouldbetheabilitytoautodistancetherobotfrom
thepalletstringer.
o Orameasurementofhowfartherobotisfromthestringertobetterposition
therobotalongthepallettohelpwithnavigationinnarrowspaces.
UNDER
TechnicalLearningforTopofDrumsrobot
• Wificontrol–asdiscussedabove.
• 3DmappingusingVelodineorSlowrevo
FOI
• AngelfishattachmentforcameraandLIDAR
o Thiswillenableustoseedownbetweenthebarrels.
o Itwillalsomeantherobotcanavoidtheouteredgeofdrumstoensureit
FEBRUARY
won’tcauseadrumtotopple.
• IMUonboard(GM3)
2019